Notes: The Camera of Mobula6 2024 changed to Runcam Nano7 Camera since Oct 2024
Features:
AIO Flight controller with Serial ELRS Receiver and 5.8G Openvtx
Super light 1S 65mm Brushless whoop only 17.7g
Equipment with the lightest brushless motors-SE0702 only 1.46gram
FX17-B 1/3 CMOS 800TVL Camera awesome footage
Smooth and powerful
Compatible for 1S Lipo/LIHV
Specifications:
Brand Name: Happymodel
Item Name: Mobula6 2024 1S 65mm ultra light micro FPV Whoop
Wheelbase: 65mm
Size: 81mm*81mm*37mm
Weight: 17.7g
Flight time: Usually 2~2.5minutes with 1s 300mah battery indoor flying.
Option:
V1 version with SuperX ELRS V1.0 AIO
V2 version with SuperX ELRS V2.0 AIO
The only difference is v2.0 AIO FC comes with motor plug but V1.0 AIO FC is no motor plug.
Package includes:
| Item Name | Qty |
| Mobula6 2024 1S 65mm whoop Drone Frame +Canopy | 1 |
| Option1: SuperX ELRS AIO 5-IN-1 Flight controller V1.0 Option2: SuperX ELRS AIO 5-IN-1 Flight controller V2.0 |
1 |
| SE0702 KV28000 brushless motor | 4 |
| Gemfan 1208-3 31mm tri-blade propellers(4cw+4ccw) | 1 |
| Nano7 1/3 CMOS 800TVL camera NTSC 4:3 | 1 |
| Onboard 5.8G 25mw~400mw VTX | 1 |
| Spare canopy | 1 |
| Propeller disassemble tool | 1 |
| Screw driver | 1 |
Spare parts specifications:
| Motor | Mode: SE0702 KV28000 Configu-ration:9N12P Stator Diamter:7mm Stator Length:2mm Shaft Diameter:Φ1mm Motor Dimension(Dia.*Len):Φ9.5mm*14mm Weight(g):1.46g No.of Cells(Lipo):1S only |
| Propellers | Materials: PC Inch: 31mm Pitch: 0.8 in Weight: 0.21g Mount hole diameter: 1mm |
| Flight controller | SuperX ELRS AIO 5-IN-1 Flight controller MCU:STM32F411CEU6 (100MHZ, 512K FLASH) ,ESP32-PICO-D4 Sensor:BMI270 or ICM42688P(SPI connection) Mount hole size: 25.5mm*25.5mm Power supply: 1S battery input (DC 2.9V-4.35V) Built-in 5A(each) Blheli_S 4in1 ESC Built-in Betaflight OSD(SPI Control) Built-in 5.8G OpenVTX 0mw~400mw (MSP control) Built-in UART ExpressLRS v3.0.0 Built-in voltage meter sensor , voltage meter scale 110 Built-in current meter sensor , current meter scale 1175 |
| Onboard 4in1 ESC | Power supply: 1S LiPo/LiPo HV Current: 5A continuous peak 6A (3 seconds) Support BLHeliSuite programmable Factory firmware: Bluejay v0.19.2 Default protocol: DSHOT300 Recommend ESC Startup power value to min1100/max1200 |
| Onboard Serial ExpressLRS receiver | Packet Rate option: 50Hz/150Hz/250Hz/500Hz ExpressLRS Firmware version: V3.0 RF Frequency: 2.4GHz Antenna : Enameled copper wire antenna Telemetry output Power: <12dBm Receiver protocol: Serial_based CRSF Compatible with ExpressLRS V3.x.x TX Module Could flash single ELRS receiver firmware by Wifi ExpressLRS firmware target: ExpressLRS firmware target: HappyModel AIO 2.4GHz RX+VTX (ExpressLRS web flasher) Available from Expresslrs version 3.4.0 RC2 |
| Onboard 5.8g VTX | Firmware version: OPENVTX MSP VTX PIT Mode support Channels:40ch Transmitting Power: 0/RCE/25mw/100mw/400mw Power supply: DC 5V Current (5v): <650ma (400mw) Antenna connector: U.FL |
| Nano7 Camera | Model:Nano7 Image Sensor: 1/3″ CMOS Horizontal Resolution: 800TVL D:150° H:120° V:98° Signal System: NTSC Net Weight: 1.9g with cable Dimensions: L14mm*W14mm*H13mm |
Factory firmware and default dump file (Compatible with both V1.0 and V2.0 version flight controller) :
Mobula6 2024 factory firmware 4.4.0
Dump file for Mobula6 2024 with Betaflight 4.4.0
Mobula6 2024 Factory firmware 4.4.2
Dump file for Mobula6 2024 with Betaflight 4.4.2
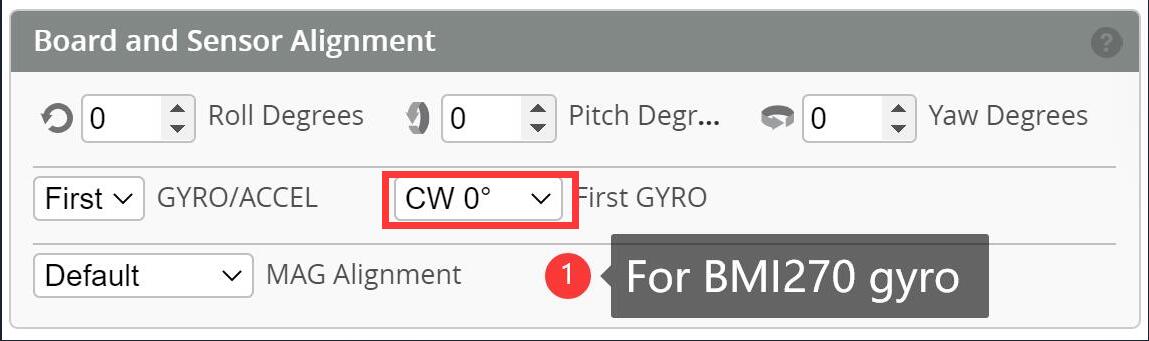
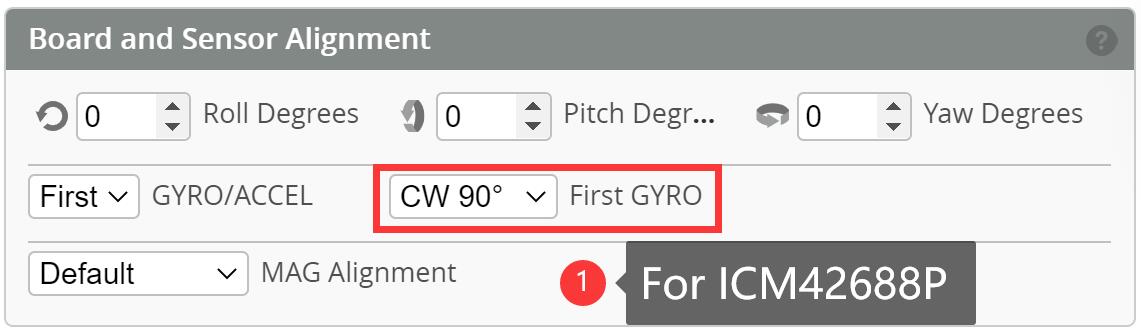
The AIO flight controller comes with two type of Gyro sensor , one is BMI270 and another one is ICM42688P
So after you re-flashed firmware ,First Gyro direction for BMI270 should set to be CW0° , and for ICM42688P should set to be CW90°
The easiest way to differentiate between BMI270 and ICM42688P:
BMI270 Gyro sensor with 3.2kHz gyro update frequence
ICM42688P Gyro sensor with 8kHz gyro update frequence
![]()

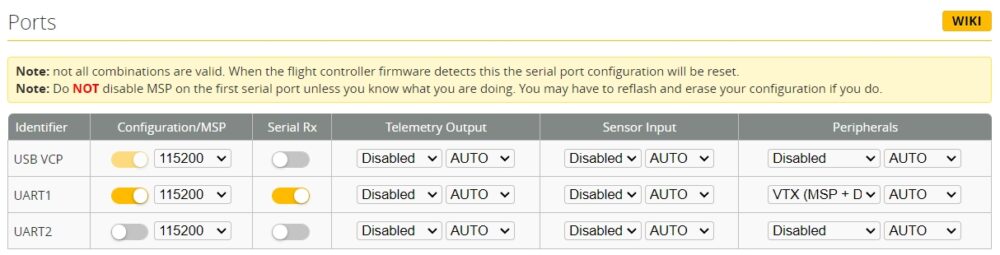
Port settings:
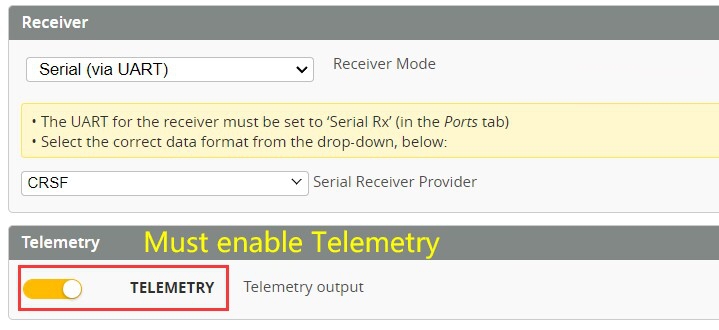
Receiver and telemetry settings: